3D specific KD tree More...
#include <K3DTree.h>
Public Member Functions | |
| K3DTree () | |
| ~K3DTree () | |
| Cleans up tree, deallocates nodes. More... | |
| void | build (std::vector< Point3D > pts) |
| void | buildByRef (std::vector< Point3D > &pts) |
| void | kill () |
| Clean the tree. More... | |
| const Point3D * | findNearest (const Point3D &, const BoundCube &, float deadDistSqr) const |
| Find the nearest point to a given P that lies outsid some dead zone. More... | |
| void | findKNearest (const Point3D &sourcePoint, const BoundCube &treeDomain, unsigned int numNNs, std::vector< const Point3D *> &results, float deadDistSqr=0.0f) const |
| Find the nearest N points. More... | |
| void | dump (std::ostream &) const |
| Textual output of tree. tabs are used to separate different levels of the tree. More... | |
| unsigned int | nodeCount () const |
| Print the number of nodes stored in the tree. More... | |
Static Public Member Functions | |
| static void | setProgressPtr (unsigned int *ptr) |
| static void | setAbortFlag (const ATOMIC_BOOL *ptr) |
Detailed Description
3D specific KD tree
Constructor & Destructor Documentation
◆ K3DTree()
| K3DTree::K3DTree | ( | ) |
◆ ~K3DTree()
| K3DTree::~K3DTree | ( | ) |
Cleans up tree, deallocates nodes.
References kill().
Member Function Documentation
◆ build()
| void K3DTree::build | ( | std::vector< Point3D > | pts | ) |
Builds a balanced KD tree from a list of points This call is being passed by copy in order to prevent re-ordering of the points. It may be worth having two calls a pass by ref version where the points get scrambled and this one which preserves input point ordering (due to the copy)
◆ buildByRef()
| void K3DTree::buildByRef | ( | std::vector< Point3D > & | pts | ) |
Builds a balanced KD tree from a list of points This uses a pass by ref where the points get scrambled (sorted). Resultant tree should be identical to that generated by build()
References kill(), AxisCompare::setAxis(), K3DNode::setAxis(), K3DNode::setLeft(), K3DNode::setLoc(), and K3DNode::setRight().
Referenced by SpatialAnalysisFilter::setPropFromBinding().

◆ dump()
| void K3DTree::dump | ( | std::ostream & | strm | ) | const |
Textual output of tree. tabs are used to separate different levels of the tree.
The output from this function can be quite large for even modest trees. Recommended for debugging only
References K3DNode::dump().
◆ findKNearest()
| void K3DTree::findKNearest | ( | const Point3D & | sourcePoint, |
| const BoundCube & | treeDomain, | ||
| unsigned int | numNNs, | ||
| std::vector< const Point3D *> & | results, | ||
| float | deadDistSqr = 0.0f |
||
| ) | const |
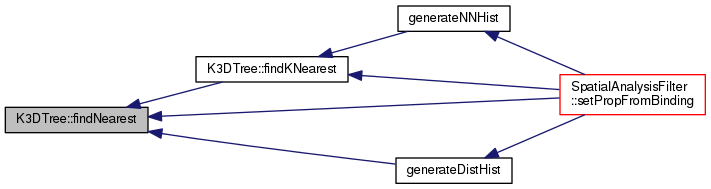
Find the nearest N points.
Finds the nearest N points, that lie outside a dead distance of deadDistSqr. k is the number to find
References findNearest(), and Point3D::sqrDist().
Referenced by generateNNHist(), and SpatialAnalysisFilter::setPropFromBinding().

◆ findNearest()
| const Point3D * K3DTree::findNearest | ( | const Point3D & | searchPt, |
| const BoundCube & | domainCube, | ||
| float | deadDistSqr | ||
| ) | const |
Find the nearest point to a given P that lies outsid some dead zone.
deadDistSqr can be used ot disallow exact matching on NN searching simply pass epsilon =std::numeric_limits<float>::epsilon() (#include <limits>) Boundcube is the bounding box around the entire dataset
References ASSERT, K3DNode::getLocRef(), K3DNode::getLocVal(), BoundCube::intersects(), K3DNode::left(), K3DNode::right(), and K3DNode::sqrDist().
Referenced by findKNearest(), generateDistHist(), and SpatialAnalysisFilter::setPropFromBinding().
◆ kill()
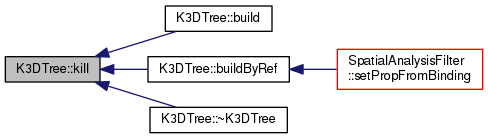
| void K3DTree::kill | ( | ) |
Clean the tree.
References K3DNode::deleteChildren().
Referenced by build(), buildByRef(), and ~K3DTree().
◆ nodeCount()
|
inline |
Print the number of nodes stored in the tree.
Referenced by SpatialAnalysisFilter::setPropFromBinding().

◆ setAbortFlag()
|
inlinestatic |
◆ setProgressPtr()
|
inlinestatic |
The documentation for this class was generated from the following files:
